Åsgardfeltet er blant de største utbyggingene på norsk sokkel, med mange brønner og mye utvinningsutstyr installert nede på rundt 300 meters dyp.
Alt utstyret på havbunnen må overvåkes og vedlikeholdes, og det er ingen enkel sak. Derfor er det utviklet slangeroboter som skal bistå som smarte vaktmestre og reparatører.
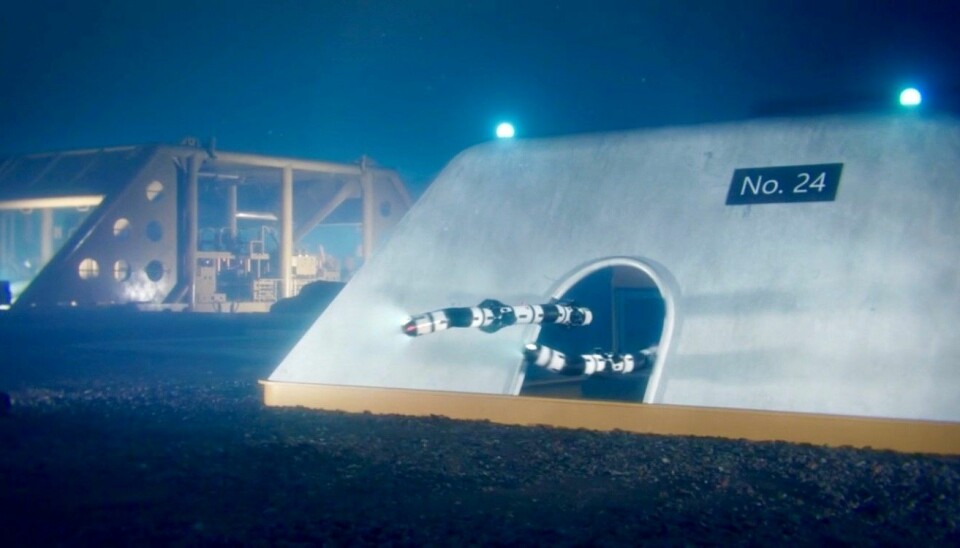
Før slangerobotene skal sendes ned i dypet på Åsgardfeltet, skal de bo på 360 meters dyp i Trondheimsfjorden i noen uker, som en siste test før de skal ut på jobb.
17 nordsjødykkere døde, flere hundre ble skadet
NRK-serien «Lykkeland» handler om starten på det norske oljeeventyret. Den viser også baksiden av eventyret, skjebner til dykkere som måtte inspisere, reparere og fikse installasjoner på havbunnen. Det gikk ikke alltid like bra.
17 dykkere mistet livet i slike operasjoner i norsk sektor i Nordsjøen på 60,- 70- og 80-tallet. Flere hundre ble skadet for livet.
På 90-tallet begynte fjernstyrte undervannsfarkoster (ROV) å overta en del av dykkernes oppgaver innen inspeksjon og mekanisk arbeid i Nordsjøen.
Med de nye slangerobotene kan man i større grad unngå å utsette dykkere for risiko, og sikkerheten vil derfor bli bedre.
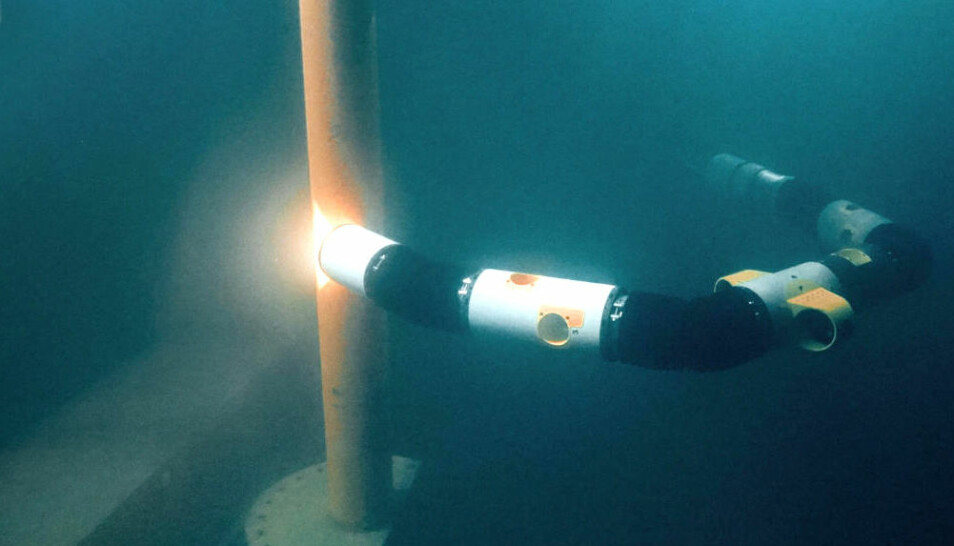
Slangeroboter kan snart drive vedlikehold av installasjoner under vann. (Foto: Eelume)
Kostnadene vil gå betydelig ned. Roboter stasjonert ved undervannsinstallasjonene, kan styres fra land og utføre oppdrag når som helst. Innsparingspotensialet for olje- og gasselskapene er stort.
I dag gjøres inspeksjon og vedlikehold av undervannsinstallasjoner ved å fjernstyre undervannsfarkoster fra kostbare overflateskip.
Slangeroboter kan også være interessante for oppdrettsnæringen og vindmøller på havet.
Første slangerobot var Anna Konda
Historien om slangerobotene startet for omlag 15 år siden, og forskere ved NTNU og Sintef har jobbet sammen for å utvikle teknologien.
Den første versjonen var Anna Konda, en buktende robot som kunne ta seg inn i brennende bygninger for å slukke branner og dermed unngå å sette brannmenns liv i fare.
– I den første tiden ble det utviklet flere ulike, lovende slangeroboter, men man strevde litt med både funksjon, design og bruk, sier Pål Liljebäck, som tidligere forsket på kybernetikk ved NTNU og i dag er teknologisjef og medeier i firmaet Eelume.
Fra land til vann
I 2012 opprettet NTNU et Senter for fremragende forskning som jobber med autonome marine operasjoner og systemer (Amos). Den landbaserte slangeroboten ble med kybernetikerne inn i dette havromsbaserte miljøet.
– Vi skiftet perspektiv fra land til vann, og så plutselig mange nye muligheter for roboten. Det var gjort lite innovasjon tidligere med denne type teknologi i vann. Dette var starten for Eelume, forteller Liljebäck.
Annonse
Legger seg til lading på havbunnen
Roboten kan styres med og uten kabel. Det unike med teknologien er at roboten har en fleksibel kropp som i seg selv er en robotarm. Den kan operere som en torpedoformet farkost som beveger seg langt, og samtidig utnytte fleksibiliteten sin til å utføre mer komplekse verktøyoperasjoner.
Den kan også komme til og operere på steder som er utilgjengelig for større undervannsfarkoster. Slangeroboten kan i tillegg inspisere langs rørledninger og skru på ventiler.
– Roboten som testes ut på nyåret kalles EELY500. Den manøvrer lettere, har bedre kamera, lys, batteri og programvare, forteller Liljebäck.
Nå jobber Eelume med dockingstasjonen hvor vaktmesterslangen skal legge seg til lading og hente verktøy – før den drar ut på nye oppdrag.