Forskere ved NTNU står bak en ny ubåt som kombinerer det beste av andre typer ubåter - en selvstyrt, liten tass som kan være både vekter og vaktmester over ressursene i havet.
NTNU Byline last nameNTNU
Hege TunstadHegeTunstadjournalist i Gemini.no
Publisert
Denne artikkelen er over ti år gammel og kan inneholde utdatert informasjon.
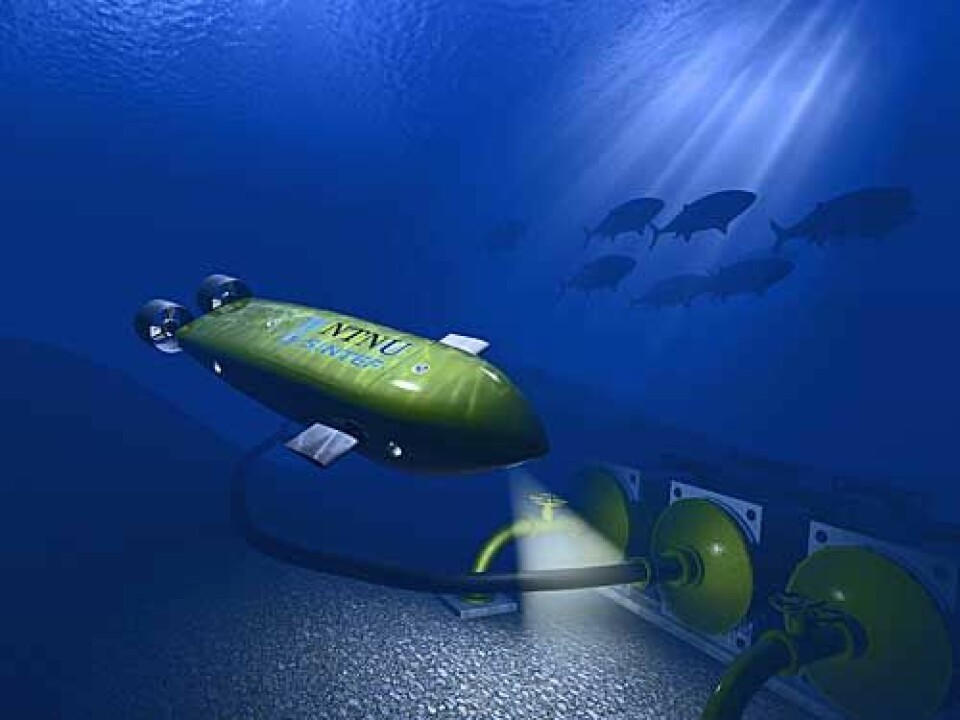
"Havets lille vaktmester. Munin kan gjøre det lettere å avsløre tjuvfiskere. (Illustrasjon: Thomas Krogstad, NTNU)"
Ubåten har fått navnet Munin og er utviklet ved Institutt for teknisk kybernetikk, av stipendiatene Even Børhaug og Thomas Krogstad.
Lille Munin er bare halvannen meter lang. Den har arbeidslys i baugen og propeller i akterenden. Inni buken har den oppbevaringsrom for ting den plukker med seg - og dessuten en verktøykasse som kan fylles med ulik redskap, alt etter behov.
Den beveger seg fritt i alle retninger, uten kabel, kan sende bilder “hjem”, og kommunisere med de tobeinte på land.
Det beste fra de beste
I dag brukes i hovedsak to typer ubåter i undervannsarbeid.
AUV er den selvstyrte varianten, som ligner mest av alt på en torpedo. Den er hurtig, men kan ikke stå i ro over et område.
ROV er den andre typen. Det er arbeidshesten som fjernstyres fra et skip, og som kontrolleres gjennom en kabel. Denne typen kan man gjøre undervannsarbeid med, og styre med en joystick fra overflaten.
Men kabelen reduserer bevegeligheten. Og båten er avhengig av et støtteskip med mannskap som har en leiepris på opptil en halv million dollar for én dag.
Hybrid
NTNU-forskerne har tatt det beste fra begge typer, og videreutviklet dem. Munin er en hybrid AUV/ROV. Den beveger seg fritt uten kabel som en AUV, men har flere propeller og ror, mer som en ROV.
Den kan både stå på stedet hvil, og skynde seg framover. Den kan stoppe helt opp og deretter posisjonere seg, skifte orientering, bevege seg sidelengs, opp og ned, uavhengig av havstrømninger og andre ytre påvirkninger
"Even Børhaug er stipendiat ved Institutt for teknisk kybernetikk. (Foto: NTNU)"
- Det betyr at den kan kjøre langs en gassrørledning og undersøke denne, og hvis det er noe som må sjekkes nærmere, kan den styre seg bort og stanse, og ta bilder som den sender hjem for analyse, sier Børhaug.
Munin kan utstyres med redskaper, for eksempel robotarmer, slik at den kan utføre vedlikeholdsarbeid.
- Så sender vi med den en “verktøykasse”. Vi forteller den hva den skal se etter, og hva den skal gjøre hvis den finner feil, sier Børhaug.
Farkosten docker til en undervannsinstallasjon og kobler seg til strøm og kommunikasjon til land. Robotarmene kan styres fra land, mens ubåten selv passer på at den ikke driver bort fra installasjonen.
Kan ta tjuvfiskerne
Annonse
- Denne typen overvåkning kan bli spesielt viktig nå som man får ubemannede installasjoner på havbunnen, og spesielt i områder som er svært sårbare for ulykker, for eksempel Lofoten, påpeker forskeren.
Med en stim av slike farkoster kan man dessuten overvåke havet og ressursene, med tanke på både forurensning, bestander, redningsoppdrag og tjuvfiskere.
- Tenk deg å ha noen små meterlange ubåter som ligger nede i sjøen og følger med trålerne i Smutthullet, tar bilder og dokumenterer hva som skjer. Da kan man kanskje få bukt med den uønskede tømmingen av havet.
Som å dressere hunder
Det viktigste som gjenstår før en stim av selvgående intelligente ubåter kan ta over som vaktmestere og vektere på havbunnen, er å lage teknologien så pålitelig at man kan stole hundre prosent på at ubåtene gjør akkurat de jobben de skal gjøre, uten at det må sitte en person og detaljstyre dem til enhver tid.
- Det blir nesten som å dressere hunder, sier Børhaug.
- Du skal stole på at de gjør akkurat det de får beskjed om, og at de kommer tilbake og “avlegger rapport” når de får beskjed om det.
Men selv om stipendiatene lykkes med å dressere lille Munin til fullkommenhet, regner de ikke med at den noen gang blir hyllevare. Bedrifter vil ha ulike behov for skreddersydde egenskaper.
- Vi designer teknologien, så får industrien ta produksjonen, slår Børhaug fast.