Denne artikkelen er over ti år gammel og kan inneholde utdatert informasjon.
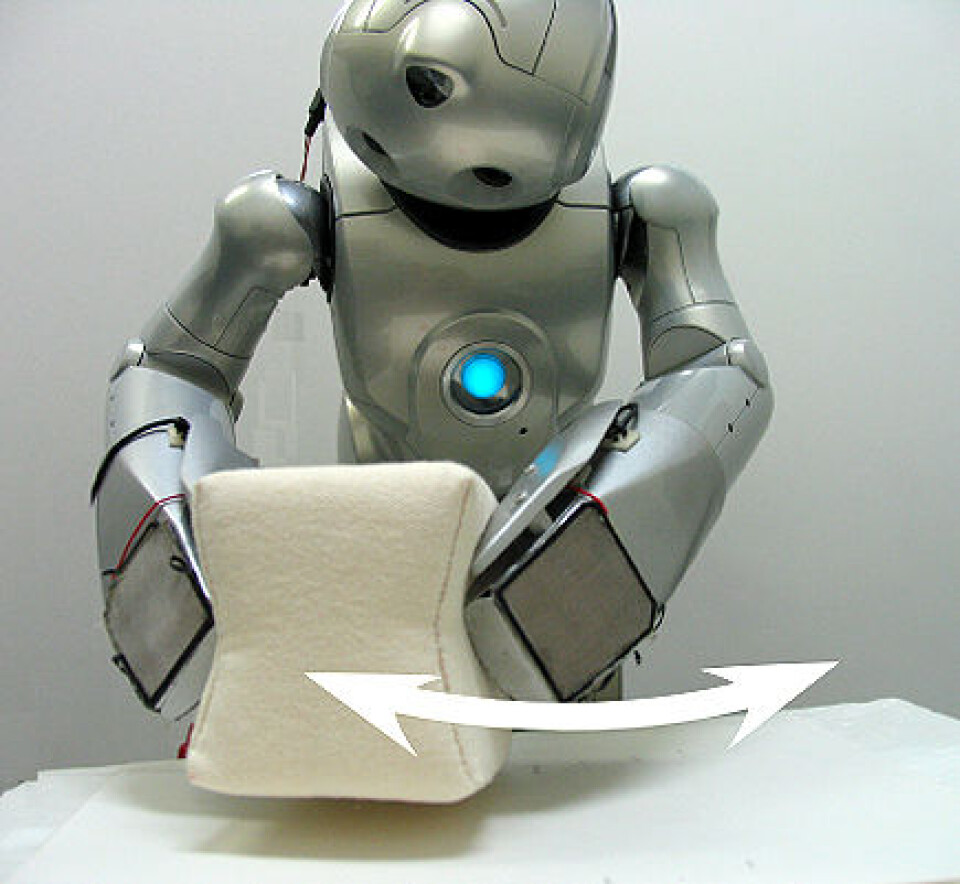
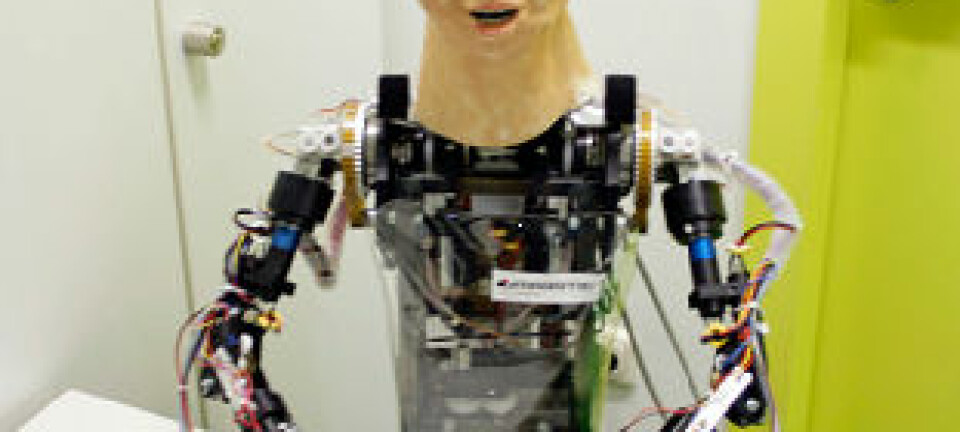
Enkle, men sammensatte oppgaver: Roboten beveger en kloss fra side til side (Foto: Yuchi Yamashita)
De japanske forskerne har brukt en menneskelignende Qrio-robot fra Sony til eksperimentene.
De viser at når roboter skal lære å utføre vanskelige oppgaver, må handlingene brytes ned i små, kortsiktige oppgaver og mer langsiktige mål.
Forskerne har også oppdaget at de langsiktige målene bygges opp i hjernen gjennom det som kalles selv-organisering. Hvordan oppstår dette?
For å gi roboter kunstig intelligens, blir robothjernene bygget med det som kalles nevrale nettverk. Slike kunstige nevrale nettverk er etterligninger av hvordan nervecellene virker i våre hjerner.
Legometoden
Ett prinsipp bak disse nettverkene er legometoden: Med enkle handlingsklosser bygger vi opp sammensatte handlinger. Dette kaller forskerne ”funksjonelt hierarki”.
Alle hverdagens gjøremål er satt sammen på denne måten. Når vi drikker et glass vann, tenker vi ikke over alle de små muskelbevegelsene i armen og strupen. Heldigvis, for ellers hadde vi trolig sølt ut alt sammen eller satt vannet i halsen.
Vi brukte mange år av barndommen på å lære slike handlingsmønstre. De har blitt automatiske. Men når roboter skal lære å oppføre seg som folk, må de gjennom samme prøving og feiling som oss.
Tidligere har forskere prøvd å bygge den kunstige intelligensen til roboter etter den samme legometoden. Enklere snutter av programmering settes sammen til mer kompliserte handlingsmønstre.
Oppstår av seg selv
Men nervecellene i hjernen er ikke bygget opp etter et slikt ”funksjonelt hierarki”. Hvordan kan de da oppstå?
Yuichi Yamashita og Jun Tani fra RIKEN hjerneforskningsinstitutt viser at de kan oppstå av seg selv. Denne selvorganiseringen skjer når handlingene sees over korte og lange tidsskalaer.
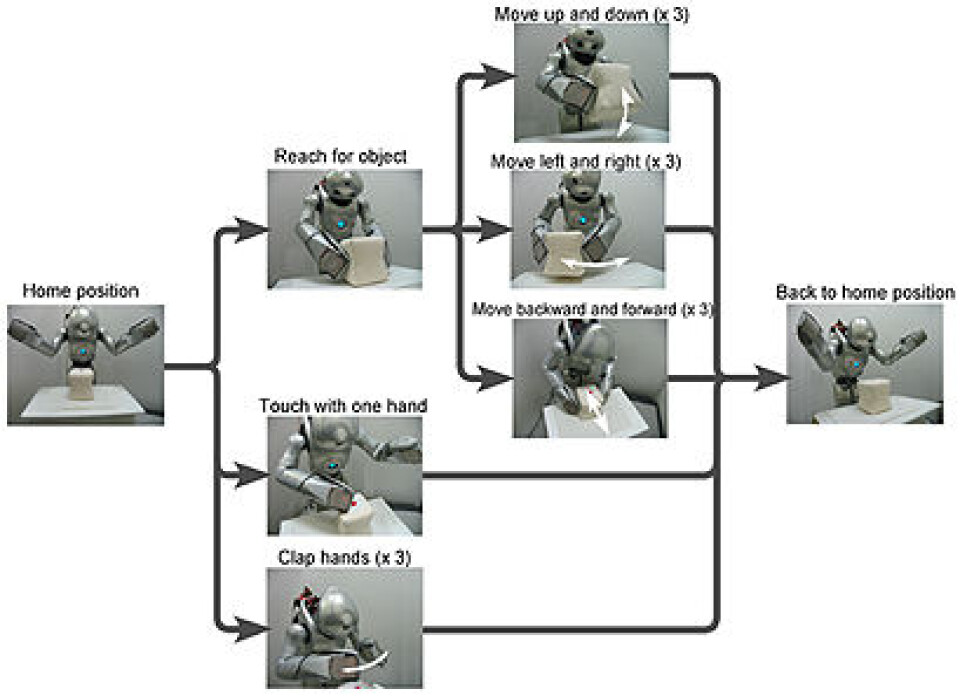
Lekerobotene fra Sony fikk beskjed om å løfte på en kloss og vrikke den fram og tilbake, opp og ned eller ut og inn.
En annen oppgave var å berøre klossen og klappe hendene sammen.
Roboten Qrio stod foran et bord med en kloss. Den fikk oppgaver som var sammensatt av enklere bevegelser. (Figur: Yuichi Yamashita)
Langsomme og raske ”nerveceller”
Disse forskjellige oppgavene var robotens langsiktige mål. Hver del av oppgaven var små bevegelser over korte tidsskalaer.
Det viste seg at når helheten ble programmert ”over langen” uavhengig av de enkelte småhandlingene, lærte roboten bedre og raskere å utføre oppgavene sine.
Annonse
Dette er en ny måte å bygge opp nevrale nettverk i kunstig intelligens på. De enkelte ”hjernecellene” i roboten var av to forskjellige typer: ”raske” og ”langsomme”.
Ut fra disse to tidsskalaene oppstod så helheten av seg selv.
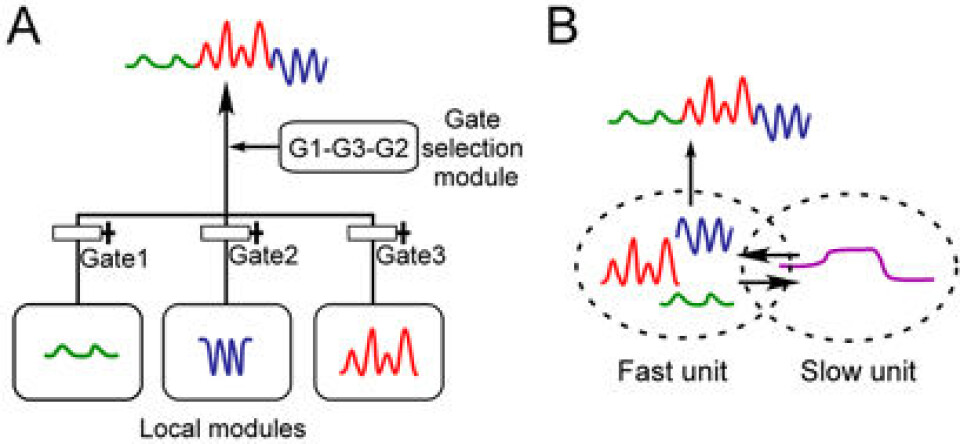
Figuren til venstre (A) viser tradisjonell bygging av komplekse handlinger etter "lego-metoden". De tre enkelthandlingene (grønn, blå, rød) kombineres etter spesielle regler til en mer komplisert handling. Til høyre (B) vises hvordan enkelthandlingene og den langsiktige målsettingen er sidestilte og påvirker hverandre gjensidig. (Figur: Y. Yamashita)