Den firbeinte roboten «Dyret» kan justere lengden på beina sine for å tilpasse kroppen til underlaget. Underveis lærer den hva som fungerer best. Slik står den bedre rustet neste gang den møter et fremmed miljø.
Navnet Dyret er et akronym for Dynamic Robot for Embodied Testing. Du har kanskje hørt om den før, men det er først nå at forskerne offentliggjør funnene som beviser at roboten klarer seg ute og uten hjelp.
– Vi har vist at det er lurt å kunne endre kroppsfasongen til en robot kontinuerlig, og vi har vist at det kan gjøres med dagens teknologi, sier førstelektor Tønnes Nygaard ved Universitetet i Oslos Institutt for informatikk.
Utfordringer utendørs
I Dyrets tilfelle innebærer det å endre kroppsfasong at den justerer lengden på beina.
– Vi mener det er nyttig å ha mekanismer som gjør at man kan tilpasse kroppen på vår robot, men antakeligvis også på andre roboter, sier førsteamanuensis Kyrre Glette.
Tidligere har de vist at roboten kan tilpasse seg ulike miljøer i kontrollerte former innendørs. Så tilbrakte Nygaard et halvt år med andre robotforskere ved den statlige australske forskningsorganisasjonen CSIRO, der de har spesialisert seg på å teste selvlærende roboter utendørs.
– Dette er blitt sett på som for vanskelig å få til i den virkelige verden. Gjennom denne roboten og gjennom de eksperimentene jeg har gjort nå, har jeg vist at det absolutt er mulig, sier Nygaard.
Resultatene publiseres nå i det vitenskapelige tidsskriftet Nature Machine Intelligence.
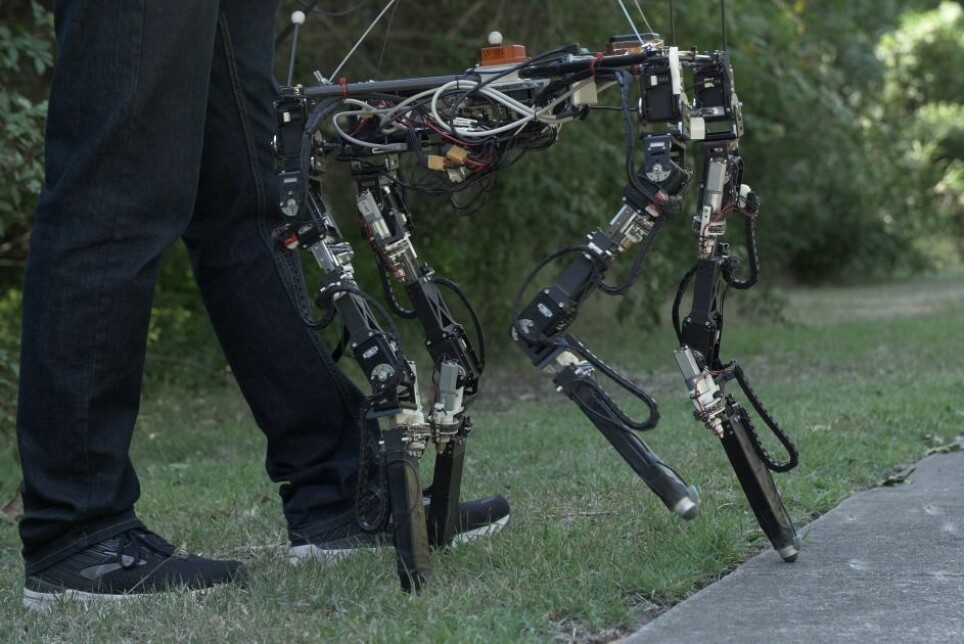
Tønnes Nygaard i Australia for å teste roboten og lære den å gå på egen hånd ute i naturen.(Foto: Jack Collins)
Du skal trø i graset
For oss mennesker er det kanskje ikke så lett å se for seg at det skal være så vanskelig å gå fra for eksempel asfalt til gress. Men husk at du har årevis med erfaring og ganske mange sanser å spille på sammenlignet med en robot.
– Den bruker kamera til å se hvor ulendt terrenget er, og den bruker sensorer i beina for å kjenne hvor hardt underlaget er når den går på det, forklarer Nygaard.
– Kombinert med litt kunnskap den har lært innendørs i et kontrollert miljø, bruker den dette sammen med erfaring den får underveis for å tilpasse kroppen.
Da Dyret skulle prøve å gå på gress, hadde den aldri sett gress før. Den hadde trent seg opp på bare småstein, sand og betong. Likevel gikk det veldig kort tid før den lærte hvordan den skulle gå på det australske gresset og hva som var den ideelle beinlengden.
– Korte bein gir bedre balanse, mens lange bein gir mer fart, som kan utnyttes hvis bakken er forutsigbar nok, sier Glette.
En flat gressplen er kanskje ikke den største utfordringen, men ute i naturen er det gjerne både tuer og hull som kan felle en langbeint robot. På asfalt kan den strekke ut beina og «løpe» av gårde.
Roboten vil også være i stand til å tilpasse seg hvis den blir skadet i møte med uforutsette hindringer.
– Med vår teknologi vil roboten kunne tilpasse seg hvis et bein knekker eller blir svakere. Den kan lære hvordan den skal gå, om den skal halte litt eller om den skal endre lengden på de tre andre beina, sier Nygaard.
Annonse
Katastrofeområder og gruver
Foreløpig er ikke Dyret klar til å ta på seg store oppgaver. Hensikten med Nygaards doktorgrad har vært å utvikle teknologien og finne passende materialer – og å bevise at det er mulig. Men forskerne ser for seg flere mulige bruksområder.
– Dette kan være gunstig i miljøer hvor man ikke vet hva roboten kommer til å møte og der det kan skje uforutsette ting. Det vil typisk være redningsoperasjoner i katastrofeområder, men også i landbruket, der det er store variasjoner i underlag og værforhold, sier Nygaard.
Han nevner også utforsking av gruver der det er vanskelig for mennesker å komme til.
– Det er også mulig å se for seg for seg andre skalaer. Mindre roboter som inspiserer rørledninger, kan for eksempel bli relevant etter hvert, sier Glette.
Han håper at denne ideen om at man kan forandre på kroppen, vil høres overbevisende ut for andre forskere og at det kanskje kan inkorporeres i andre typer roboter.
Og hvorfor ikke en tur til Mars eller andre oppdrag i verdensrommet?
– Jeg tenker at romroboter i prinsippet gjerne kunne hatt denne teknologien fordi de ofte vil møte uforutsette oppgaver. Hvis de hadde hatt mulighet til å forandre seg eller reparere seg, ville det være bra, sier Glette.
Men det vil nok drøye en stund. Det skjer ikke over natten at den bransjen tar i bruk ny teknologi. De må tross alt være helt sikre på at alt fungerer etter landing.
– Hvis du sender en robot til Mars, er det veldig dumt å bomme, sier Nygaard.
Jeg gikk en tur på stien. «Dyret» prøver seg på fremmed grunn.(Foto: Tønnes Nygaard / UiO)
Fordeler ved selvlæring
Hver gang Dyret klarer å tilpasse seg et nytt underlag, vil den være enda bedre rustet til å møte ytterligere nye underlag. Det er den store fordelen ved at den er selvlærende.
Annonse
Hvis forskerne skulle programmert den til å klare seg på ulike underlag, er det ikke sikkert at de faktisk velger det som er ideelt for roboten.
– Vi antok at for eksempel at småstein er veldig hardt, men for roboten oppleves det ikke slik, og det er noe den plukker opp, sier Nygaard .
Den finner selv ut at det ikke er så hardt og justerer beinlengden deretter. Dermed blir tilpasningen bedre enn om den skulle vært basert på menneskelige antakelser som kanskje ikke stemmer.
Det betyr at den også må få lov til å feile litt. Som et barn som lærer seg å gå.
– Du må la roboten velge noen dårlige løsninger først, sier Nygaard.
For sikkerhets skyld hadde han med seg en koffert med reservedeler da han dro til Australia for å teste roboten utendørs.
– Men jeg fikk ikke bruk for mer enn et par stykker av dem.
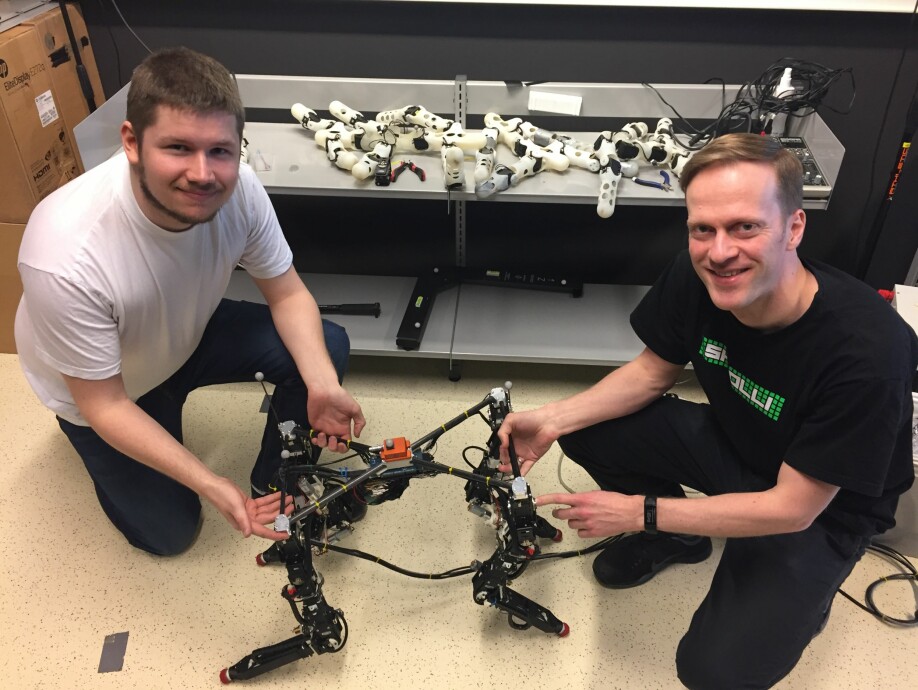
Tønnes Nygaard og Kyrre Glette med «Dyret» i 2019, da roboten så vidt hadde lært seg å gå. Arbeidet har utspring i prosjektet EPEC – Engineering Predictability with Embodied Cognition.(Foto: Mette Johnsrud / UiO)
Tilgjengelig for alle
Nygaard jobber nå ved Forsvarets forskningsinstitutt med andre og ferdig utviklede roboter som kanskje har nytte av å tilpasse kroppen sin. Men han vil også jobbe videre med Dyret på Institutt for informatikk ved Universitetet i Oslo.
– Sammen med masterstudenter vil jeg prøve ut nye måter å lære på, nye eksotiske metoder som jeg ikke rakk å komme til, sier han.
Hvem som helst, særlig robotforskere selvfølgelig, kan benytte seg av den nye teknologien.
– Jeg har gitt ut alt som åpen kildekode. Alle kan ta det vi har gjort og gjøre hva de vil. De kan laste ned designen til roboten og bygge sin egen. Men jeg tror det er mer relevant for folk som bygger en egen robot og gå inn og se hvordan vi har løst akkurat én liten del, sier Nygaard.
Annonse
Første mål er i hvert fall nådd.
– Nå er den testet utendørs i fremmede miljøer, og vi har utstyrt den med en maskinlæringsalgoritme som samler inn data og tilpasser seg og lærer ute i naturen, sier Glette.
– Nå er den klar til å takle det som er av miljøer og underlag, sier Nygaard.
Referanse:
Tønnes Nygaard mfl.: Real-world Embodied AI Through a Morphologically Adaptive Quadruped Robot. Nature Machine Intelligence, 2020. (Sammendrag)