Solcelleparkene over hele verden blir større og større, og det blir stadig vanligere at nye kontorbygg blir utstyrt med solcellepaneler på tak og fasader.
Solcellepaneler blir av og til skadet, og strømutbyttet og lønnsomheten blir redusert. Dermed er viktig å finne fram til de skadde panelene som bør byttes ut. Men den jobben er ikke enkel.
– Tidligere har det vært vanlig å gå rundt i solcelleparkene med et håndholdt varmekamera for å finne de skadde solcellepanelene. Men disse parkene blir jo bare større og større, og dermed blir den jobben mer og mer uhåndterlig. Det er heller ikke enkelt å klatre rundt på hustak og fasader for å lete etter defekte solcellepaneler, forteller doktorgradsstipendiaten Victoria Lofstad-Lie ved Institutt for teknologisystemer (ITS) på Kjeller.
Bjørn Lupton Aarseth og Mari Øgaard forbereder et forsøk med håndholdt varmekamera. Når man ikke har tilgang på solcellepaneler med feil kan man lage noen selv – i dette tilfellet ved å slå med en hammer fra undersiden.(Foto: ITS)
Droner, maskinsyn og grønn energi
Victoria Lofstad-Lie og tre andre stipendiater ved ITS, Mari Øgaard, Tor Atle Solend og Bjørn Lupton Aarseth, er derfor i gang med å utvikle en ny teknologi. Den er basert på droner og maskinsyn som skal gjøre den «grønne» solcelle-elektrisiteten enda grønnere.
Istedenfor manuelle inspeksjoner, vil de fire forskerne sende opp en selvstyrende drone – eller en hel dronesverm hvis anlegget er stort nok – som er utstyrt med et varmefølsomt kamera og en bitteliten pc.
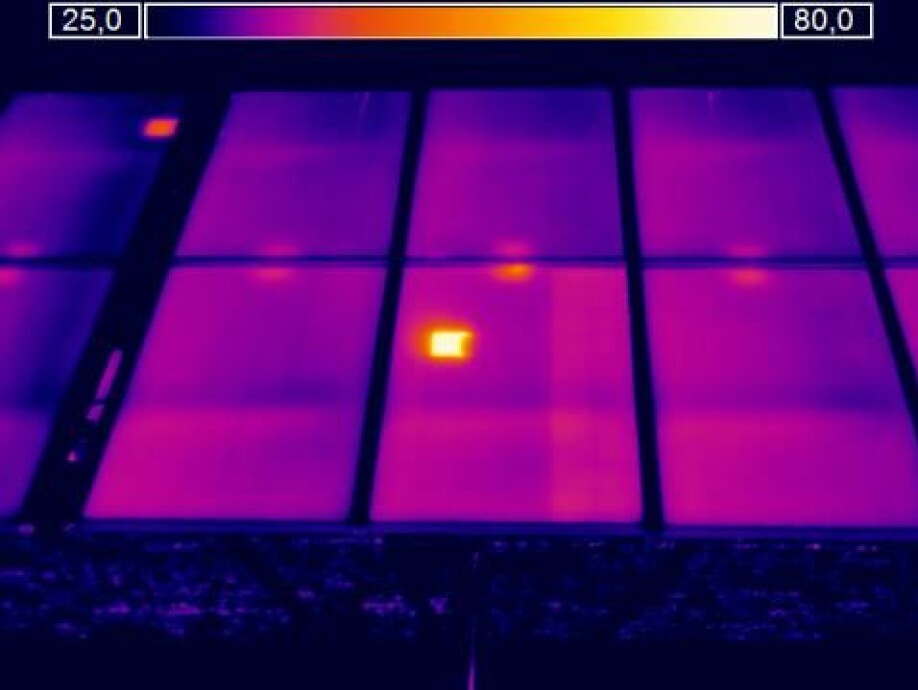
– Feil på solcellepaneler fører nemlig som regel til at det defekte området blir varmere, forteller Lofstad-Lie.
Forskerne bruker maskinsyn når de skal trene opp dronene til å finne de defekte og varmere solcellepanelene og til å manøvrere rundt på anleggene.
– Maskinsyn er en type bildebehandling som gjør at dronen analyserer mest mulig av hva som er på bildene den tar. Jeg jobber blant annet med en programvare som kan gjøre at dronen automatisk finner rammen på modulene, slik at den også kan vite hvor den skal lete etter varme defekter, forteller Lofstad-Lie.
Deretter skal dronen også kunne utføre en automatisk indeksering, som er en full oversikt eller innholdsfortegnelse, av modulene. Dronen kan så gi beskjed hvis det for eksempel er feil på modul 16E. Et kart viser hvilken modul det gjelder.
Hun synes det er et tankekors at produsentene av solceller ofte bruker store summer på å utvikle nye generasjoner av solceller med en økt effektivitet på kanskje bare 0,1 prosent.
– Etter at solcellepanelene er blitt utplassert, kan det fort oppstå feil som reduserer strømutbyttet med kanskje 2 prosent uten at noen reagerer. Da får man ikke noe igjen for de kostnadene som gikk med til å øke effekten i produksjonsfasen. Derfor mener vi det er en god investering å bruke droner til å lete etter slike feil, sier hun.
Dette bildet viser en typisk termisk signatur som forteller at det er en feil i solcellepanelet.(Foto: ITS)
Utviklingsarbeid basert på hyllevare
De varmere og ødelagte områdene på solcellepanelene kan bli oppdaget med et nokså vanlig kamera som registrerer infrarød stråling. Forskerne fant en leverandør som produserte veldig små og lette kameraer.
– Vi kjøpte også inn en nokså vanlig batteridrevet drone og en lett, bitteliten datamaskin som veier rundt 50 gram. Alt dette er hyllevare, så jobben vår består i å montere komponentene og utvikle programvaren, forteller Lofstad-Lie.
De fysiske komponentene er altså forholdsvis enkle, men prosjektet rommer mye utviklingsarbeid.
ITS-forskerne er i gang med å utvikle programvare som gjør at den lille datamaskinen kan styre både dronen og kameraet. Og festet for kameraet på dronen var ikke hyllevare, så det ble laget med en 3D-printer.
Mest mulig selvstyrt
Annonse
Datamaskinen i dronen skal fortløpende lagre nøyaktige GPS-data om hvor dronen er, hvor høyt den flyr, med hvilken fart og så videre.
Når dronen finner et defekt panel, kan den fly nær panelet og ta et mer detaljert bilde. Målet er at alt dette skal foregå mest mulig autonomt mens dronen flyr, forteller Lofstad-Lie.
– Teknologien vi utvikler skal kunne si noe om hvilken type feil som er funnet. I dag er det vanlig å bytte hele solcellepanelet hvis de infrarøde bildene avslører en feil, men det er ikke gitt at det alltid lønner seg å skifte ut et panel med en liten feil. Det finnes jo mange slags feil, og det er ikke alle som fører til et stort strømtap, tilføyer hun.
De fire forskerne har hittil fløyet dronen manuelt, blant annet har de vært et par ganger i Glava Energy Center i Sverige. Der har solcelleprodusenten Glava bygd opp en hel park med paneler som inneholdt feil som var store nok til at panelene ikke kunne selges, men de produserer likevel strøm.
Dette var ideelt for forskerne som skulle lete etter bestemte avvik i temperaturforskjeller, såkalte termiske signaturer, på paneler som var skadet.
– De fleste solcelleparker er ganske nye og det er få feil å finne på disse. Men i Glava-parken var det mange feil som ga oss gode muligheter til å teste dronen og programvarene, sier Lofstad-Lie.
Victoria Lofstad-Lie er i ferd med å ta en innovasjonsdoktorgrad ved Institutt for teknologisystemer.(Foto: Bjarne Røsjø / UiO)
Sammenkoblede paneler
Et solcellepanel består typisk av 60 sammenkoblede solceller på 15 x 15 centimeter. Et panelet dekker om lag halvannen kvadratmeter. 20 paneler kan være koblet sammen til en gruppe som leverer elektrisk strøm via den samme kabelen.
Det gjør at det er vanskelig å oppdage feil ved ett av de 20 panelene fra et kontrollrom. For det er mange faktorer som gjør at strømmen varierer, mye mer enn bare ødelagte paneler.
– Strømutbyttet fra en gruppe paneler kan variere av solinnstråling, solvinkel, temperatur, vind, støv og skitt og så videre. Det er vanskeligere enn man skulle tro å finne en feil ved kun å se på strømutbyttet, sier Lofstad-Lie.
De fire ITS-forskerne er ikke de eneste i verden som har tenkt på å bruke droner til å finne feil i solcelleparkene, men hittil har mange i sol-industrien forsøkt å finne opp hjulet på nytt hver for seg.
– Det finnes ingen standardisert måte å gjøre dette på, og vi ser derfor et potensial for å gjøre dette mye mer effektivt. Hvis solcelleparken er over en viss størrelse, vil det blant annet være gunstig å bruke en dronesverm istedenfor en enkelt drone. Da må vi også lære dronene i svermen å manøvrere slik at de dekker hvert sitt område og ikke krasjer med hverandre. Det er nok av utfordringer å ta tak i her, understreker Victoria Lofstad-Lie.
Annonse
Mange slags feil
– Hva slags feil er det vanlig å finne på solcellepaneler?
– Noen skyldes sprekker i panelene under produksjon, transport eller montering. Om montørene bærer panelene på hjelmen kan modulen bli bøyd slik at det oppstår sprekker som etterhvert blir større, sier Lofstad-Lie.
Det kan oppstå feil i elektriske koblinger ved lekkasjer i det øverste laget på panelene som skal beskytte mot vann. I tørre områder blir panelene støvete, og i kombinasjon med mye vind kan dette skade evnen panelet har til å ta imot energi fra sola.
– De aller fleste feilene kan uansett oppdages ved hjelp av et varmesøkende kamera, tilføyer hun.
Tor Atle Solend gjør noen siste justeringer før take off.(Foto: ITS)
Sertifikat på drone
De fire ITS-forskerne er sertifiserte dronepiloter, etter selvstudium og bestått prøve utformet av Luftfartstilsynet. Testen ble avlagt ved personlig frammøte på en trafikkstasjon hos Statens vegvesens.
Victoria Lofstad-Lie fikk inntrykk av at de ansatte på den trafikkstasjonen hun besøkte ikke hadde fått mange slike forespørsler tidligere.
De fire drone-utviklerne er i ferd med å ta det som kalles innovasjonsdoktorgrader ved Institutt for teknologisystemer (ITS) på Kjeller. Institutt for energiteknikk (IFE) og Forsvarets forskningsinstitutt (FFI), som også holder til på Kjeller, er partnere i prosjektet.