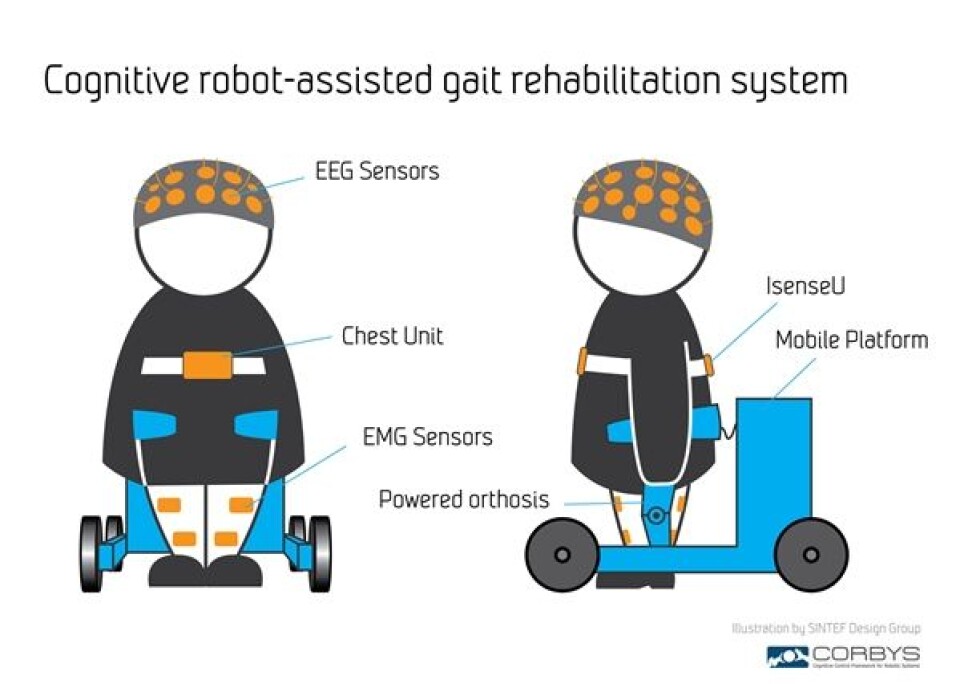
De oransje firkantene viser sensorer som måler muskelaktivitet på legg og lår. På brystet måles hjerteaktivitet, temperatur og bevegelse, mens temperatur, fuktighet og bevegelse måles på ryggen. EEG-hetten måler hjerneaktivitet. (Foto: SINTEF)
Om prosjektet
EU-prosjektet CORBYS har en totalramme på 8,7 millioner Euro
Universitetet i Bremen leder prosjektet og er arkitekturansvarlig, tyske eksperter skal bygge den mekaniske delen, mens to universitet i Storbritannia arbeider med den kognitive delen.
Spanske spesialister tar for seg måling av hjerneaktiviteten, universitetet i Brussel har med styring av roboten, mens Sintef jobber med fysiologiske sensorsystemer i tillegg til å ha jobben med å få alt til å fungere sammen til slutt.
Hjerneslag er den hyppigste årsak til funksjonshemming blant eldre i Vesten. Slaget fører ofte til en lammelse på den ene siden av kroppen.
Mange pasienter blir sterkt redusert fysisk, og pasientens mulighet til å gå selv kan ofte bli kraftig redusert.
Forskere i seks land er nå i gang med et robotsystem som skal hjelpe slagpasienter å trene opp kroppen igjen. Konseptet går på å bygge opp et system med et motorisert utvendig skjelett som hjelper pasienten å bevege føttene, og en mobil plattform som flytter pasienten.
I tillegg prøver forskerne å gøre roboten i stand til å tolke det som kommer inn av data fra pasienten og tilpasse treningsprogrammet til pasientens behov og ønsker. Dette tar utviklingen et skritt videre sammenlignet med system som er i omløp.
Tilbake til normal gange
Slagpasienter må raskt opp av sengen. De må ha hyppige treningsøkter. Og gangmønsteret må trenes opp igjen så pasienten kan fungere best mulig etterpå.
– Disse kravene er vanskelige å oppfylle med dagens arbeidskrevende manuelle metoder, der gjerne to fysioterapeuter følger pasienten og løfter ett og ett bein i en gangsyklus, sier IKT-forsker Anders Liverud ved SINTEF.
Læring mellom robot og pasient
I prosjektet skal fysiologiske data som hjerterate, temperatur og måling av muskelbevegelser, brukes som tilbakemelding til terapeut og til å styre roboten. Følger beina med dit hodet vil? Begynner pasienten å bli sliten og stresset?
Gå-roboten har flere innstillinger, og terapeuten velger riktig modus for pasienten ut fra hvor langt hun er kommet i rehabiliteringen.
– På første trinn utstyres pasienten med sensorer rundt om på kroppen og starter opp på en tredemølle. En fysioterapeut korrigerer gangen manuelt, og ved hjelp av sensorene lages det en modell av gangen til hver enkelt pasient, forteller Liverud.
I neste trinn korrigerer systemet gangen mot det som er blitt definert i modellen. Nye korreksjoner lagres og brukes for ytterligere å optimalisere gangmønsteret.
Pasienten har en EEG-hette på hodet som måler hjerneaktiviteten.
– Robotsystemet kombinerer signaler fra EEG og de øvrige sensorene for å registrere om pasienten ønsker å stoppe, endre hastighet eller svinge, og tilpasser seg umiddelbart.
– Den korrigerer fortsatt feil i gangmønsteret, men siden den også gir frihet til å velge hvor og hvordan en vil gå, oppnår pasienten å ha kontroll og får motivasjon for fortsatt trening, forteller Liverud.
Forskerne er nå ferdige med å spesifisere systemet og komponentene - og er i gang med å bygge selve roboten.
Om ett år skal sammenstillingen være gjort – og roboten skal testes på slagpasienter ved rehabiliteringsinstitutter i Slovenia og Tyskland.