Denne artikkelen er over ti år gammel og kan inneholde utdatert informasjon.
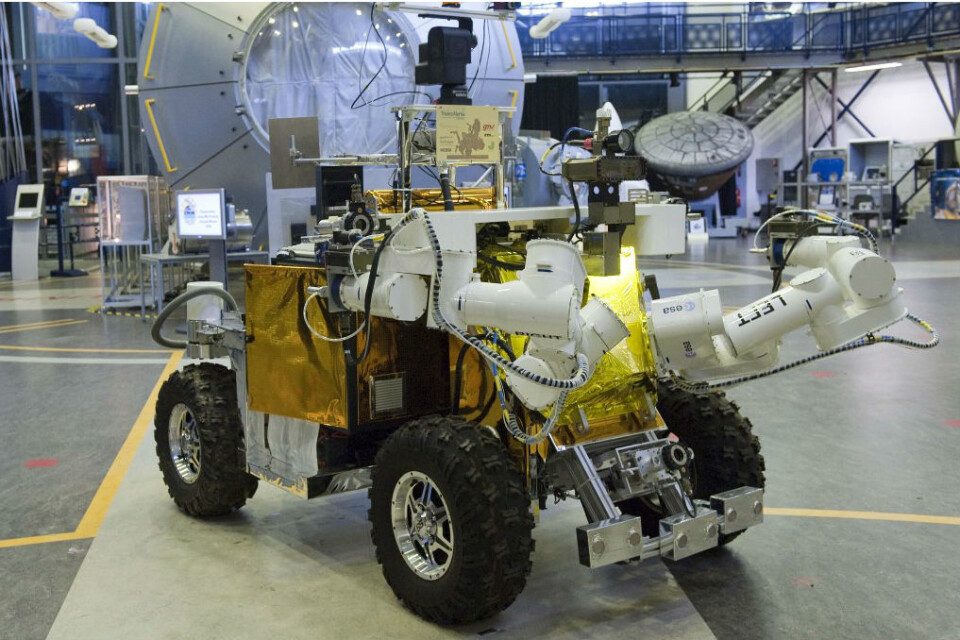
Eurobot skal rulle rundt i Nederland, men styres fra ISS. (Foto: Anneke Le Floc'h)
I samarbeid med
METERON (Multi-purpose End-To-End Robotic Operations Network)-prosjektet til ESA har som mål å optimalisere kommunikasjon mellom mennesker og roboter i verdensrommet.
I ettermiddag skal systemet testes når en astronaut ved ISS skal styre en robot i Nederland.
Når vi dødelige mennesker skal ut og utforske nye planeter kan det være veldig greit å ha sendt roboter i forveien.
METERON, med nordmannen Kim Nergaard som sjef for Advanced Mission Concepts Section, jobber for å finne ut hvordan vi best kan kontrollere disse robotene.
– Det legges veldig mye arbeid i å finne ut hva neste skritt for mennesket i rommet er. Vi vet at det trengs roboter, et område som veldig ofte blir glemt er hvordan disse skal styres, sier han til NRK.no på telefon fra Darmstadt, Tyskland.
Klokken 18.35 starter et eksperiment som omhandler nettopp dette. Alexander Gerst skal fra ISS styre Eurobot, en rover på størrelse med Curiosity, som befinner seg i Noordwijk, Nederland.
Tillit fra ISS
ESA-forskerne benytter seg av DTN (Disruption-Tolerant Networking) når euroboten skal kontrolleres fra romstasjonen.
– DTN er en protokoll som gjør at man kan ha internett med forsinkelser og brudd. Vanlig internett takler ikke dette, da blir ting sendt på nytt.
– I OPSCOM-1 var hensikten å teste at protokollen i det hele tatt virker. Det klarte vi, og nå har ISS-miljøet fått tillit til oss. Nå skal vi teste egenskapene til DTN. Vi gjør forskning på hvordan det reagerer på brudd, statistikk på hvordan det virkelig virker, forklarer Nergaard.
Fra Lego-bil til bil
Under det første eksperimentet brukte de en liten rover lagd av Lego, nå har de oppskalert til et 800 kilo tungt kjøretøy.
– Den nye roveren har større funksjonalitet. Den har armer, og både større og flere kamera, noe som gjør den bedre egna til å utforske en annen planet, sier Toril Bye Rinnan som er Rover Operations Engineer til NRK.no.
Bakkekontrollen kjører roveren til et bestemt sted, så tar astronauten over og styrer finmanipuleringa.
Siste nordmann med på laget er Åge-Raymond Riise som er Ground Operations Manager, han fungerer som reserve under dagens eksperiment.
Kim Nergaard og Toril Bye Rinnan er to av tre nordmenn involvert i METERON-prosjektet. (Foto: ESA)
Vil styre fra bane
Nergaard har stor tro på at eksperimentet blir vellykka.
– Vi føler at alt er i rute, vi har simulert hva som skal sje på torsdag, og testet prosedyrer. Når noe skal styres fra ISS er det alltid en sjanse for at noe går galt, men vi føler oss sikre på at det kommer til å gå bra.
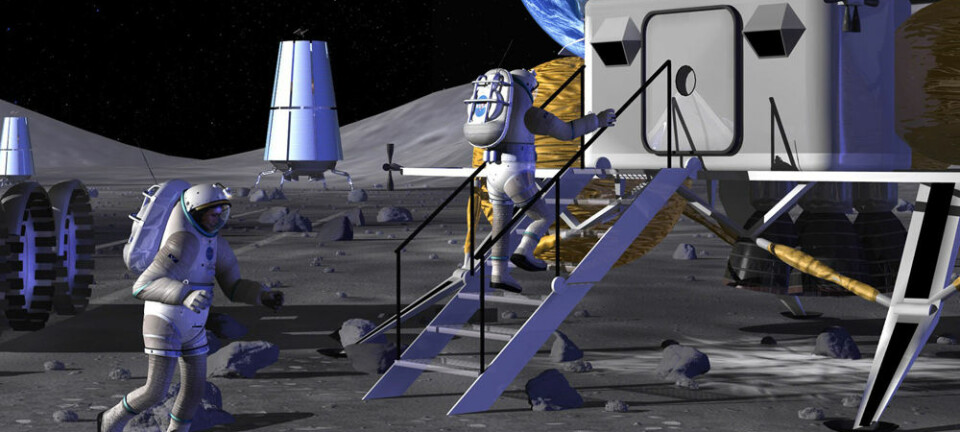
OPSCOM 1 og 2 er i utgangspunktet forberedelseseksperimenter til SUPVIS-1 – hovedeksperimentet som skal gjennomføres i september 2015.
– Da skal vi ha et team som simulerer at de kjører et måneoppdrag med mannskap i bane rundt månen. Vi bruker systemene vi har utviklet med OPSCOM 1 og 2 for å simulere den verdenen.
Rinnan forteller at det er mange som jobber med roboter og hvordan de kan styres fra Jorda.
– Men vi vil styre dem fra en bane rundt planeten.
































{kind=link}