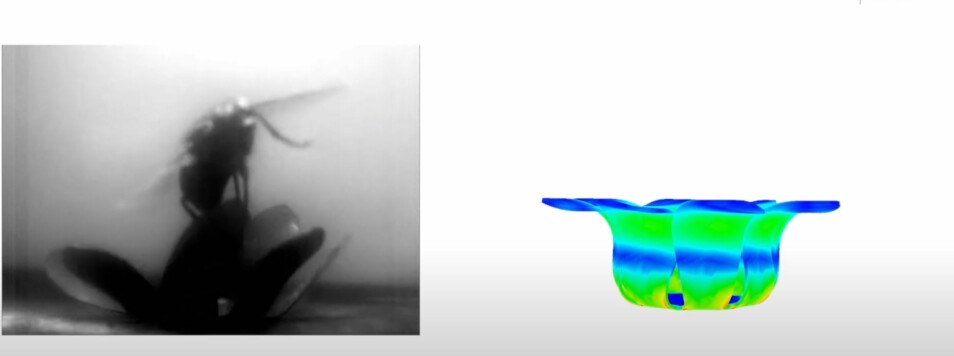
På venstre side av bildet ser du en blomsterlignende robot som prøver å fange en flue.
(Bilde: Skjermdump/Makarov, et al.; Communications Materials)
Disse myke robotene reagerer lynraskt
Robotene er ikke laget av noe annet enn et gummimateriale og magnetiske partikler.
Myke roboter kan være noe veldig annet enn de klassiske industrielle eller menneskelignende robotene.
Et eksempel på eksperimentelle, myke roboter blir beskrevet i en ny forskningsartikkel i tidsskriftet Communications Materials.
Disse robotene har nesten ikke noen deler som ligner på de man vanligvis tenker på når man ser for seg moderne roboter. Her finner du ingen hydraulikk, servomotorer eller avansert elektronikk.
De består av en nøye designet form, laget av magnetiske gummi-materialer. Utformingen av roboten er basert på jobben den skal gjøre, så dette er spesialiserte maskiner.
Forskerne har designet en robot som kan svømme, en som kan gripe ting, en som kan «løpe» og flere andre varianter som demonstrerer teknologien.
Men hva skal det brukes til?
Siden robotene ikke har noen klassiske bevegelige deler, hvordan beveger de seg egentlig rundt? De henger heller ikke fast i tråder eller andre festeanordninger.
Svaret er magnetiske felt. Forskerne «programmerer» robotene ved selve utformingen av roboten og manipulering av magnetiske felt utenfor og rundt roboten. Forskerne brukte også simuleringer til å undersøke hvordan robotene oppfører seg.
De magnetiske feltene kan være veldig svake, blant annet på grunn av robotenes lille størrelse og lave vekt.
De kan ha svært raske bevegelser, som du kan se på fluefanger-roboten i videoen under.
Men ideen er ikke basert på svært raske og eksotiske insektsfeller. Forskerne ser for seg at denne typen roboter blant annet kan brukes i kirurgi, hvor de kan være skånsomme og kan klemme seg fram på små steder. De kan også brukes som deler i større maskiner
Under kan du se flere varianter av disse robotene som gjør forskjellige oppgaver. Disse robotene er bare noen millimeter i størrelse, og de veier noen titalls milligram.
Her er det en gående variant:
Denne kan brukes som en robotarm for å plukke opp og bære ting:
Denne leviterer ved hjelp av magnetisme:
Referanse:
Wang mfl: Untethered and ultrafast soft-bodied robots. Communications Materials, 2020. DOI: 10.1038/s43246-020-00067-1.