Denne artikkelen er over ti år gammel og kan inneholde utdatert informasjon.
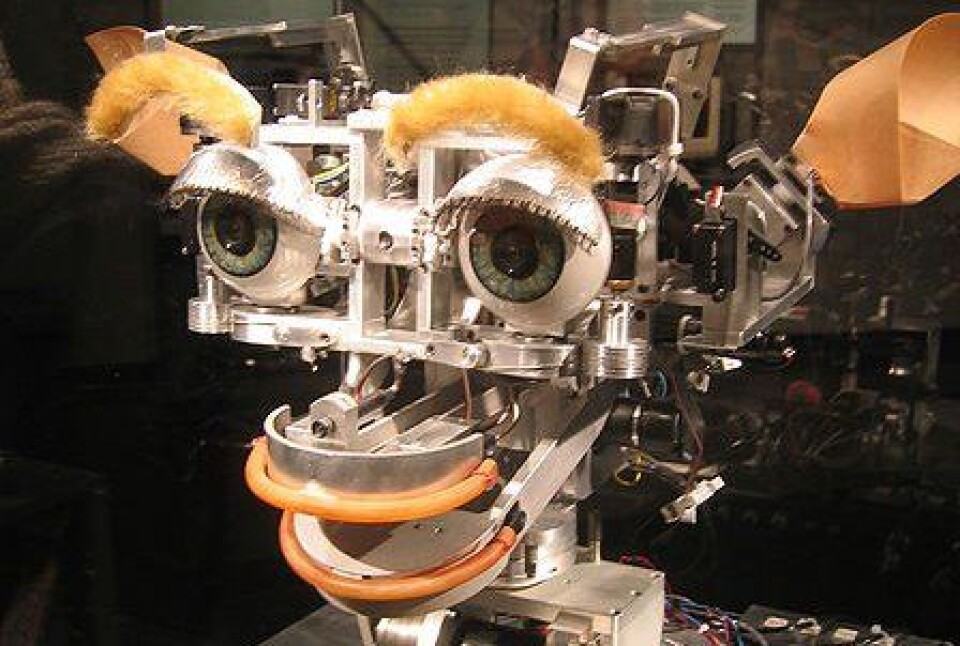
Den flittige sykehusroboten vasker gulv og deler ut medisiner til pasientene. Den påtar seg i det hele tatt mange tunge, vanskelige og rutinepregede oppgaver fra sine dødelige kolleger.
Kollegenes takknemlighet kan imidlertid bli begrenset fordi roboten lider av en total mangel på situasjonsforståelse.
Den snakker i et monotont tonefall, lirer hjernedødt av seg de samme setningene uansett om det er overlegen eller rengjøringsdamen den står overfor, og kommer brasende inn i møtelokalet uten å spørre om lov.
Robotene er skapt for å hjelpe, men er ganske enkelt for asosiale til helt å kunne sette seg i sine kollegers sted, og ender derfor ofte med å bli et irritasjonsmoment.
(Foto: Wikimedia Commons)
Kommunikasjon krever innlevelsesevne
Det problemet vil danske forskere fra DTU Informatik og Matematisk Modellering gjøre noe med.
De er i full gang med et forskningsprosjekt som går ut på å utstyre roboter, datamaskiner eller andre agenter med kunstig intelligens-systemer som har en innebygget situasjonsfornemmelse.
Målet er å utvikle en hjerne som kan spore hvem brukeren er, slik at den kan tilpasse arbeid og atferd etter den enkeltes behov.
– Sykehusroboter ofte beskrevet som ekstremt irriterende fordi de er ute av stand til å sette seg inn i personalets situasjon, og dermed ikke kan handle sosialt intelligent, forteller førsteamanuensis Thomas Bolander fra DTU Informatik og Matematisk Modellering.
– Problemet er at kunstig intelligenssystemer i dag ikke i tilstrekkelig grad er i stand til å forstå de menneskene som omgir dem. Det er det jeg og kollegene mine er i gang med å finne en løsning på. Vi har akkurat klart å utvikle en teoretisk ramme hvor man kan eksperimentere med disse tingene, sier han.
Danne seg et bilde
En forutsetning for å kunne kommunisere med mennesker er at robotens hjerne kan danne seg et bilde av den personen den skal arbeide sammen med.
Robotens hjerne skal altså romme en modell av brukeren, det som innen kognitiv psykologi kalles for «a theory of mind».
Bolander illustrerer hjernens evne til å sette seg i andres sted ved et eksempel:
– Når du spør meg om forskningsnyheter å skrive om, bruker jeg evnen min til å modellere andre mennesker og kunnskapen min om deg til å forsøke å tilpasse mine utsagn til et passende nivå i forhold til den kunnskapen om emnet jeg forventer at du har.
– Hvis det var min syvårige sønn, hadde jeg valgt et lavere abstraksjonsnivå, og hvis det var en ph.d.-student, ville jeg valgt et høyere, sier han.
Inspirasjonskilden er mennesket
Annonse
I dag finnes det imidlertid ingen kunstig intelligens-systemer som for alvor kan sette seg i andres sted og fornemme hva brukeren kan og hvilken tilstand vedkommende er i.
Veien til målet er lang fordi man må utvikle et system som både kan modellere den fysiske verden og som samtidig kan forholde seg til levende menneskers tanker, kunnskap, intensjoner og mål.
– Helt konkret forsøker vi å lage kunstig intelligens som kan reflektere over andres kunnskap eller mangel på kunnskaper. Det er bare et lite skritt på veien mot å ha kunstig intelligens som sosialt sett kan måle seg med mennesker.
– Forhåpentligvis vil prosjektet avklare noen av problemene og bringe oss et stykke nærmere, sier han.
Matematisk modell
Forskernes inspirasjonskilde er kort sagt mennesket, og målet er å skape en kunstig intelligens som etterligner den måten vi tenker og oppfører oss på når vi er sammen med andre.
Bolander og kollegene hans prøver å bygge opp en kunstig intelligens ved å kombinere teorier fra kognitiv psykologi, sosiologi, filosofi, spillteori og økonomi, som med hvert sitt fokus beskriver menneskers atferd og ulike måter å interagere med hverandre på.
– Vi prøver å skape en matematisk modell for hvordan mennesker kommuniserer, tilpasser seg og oppnår kunnskap. Så snart modellen er presisert matematisk, er det overkommelig å simulere den kunstige intelligensen på en datamaskin, sier han.
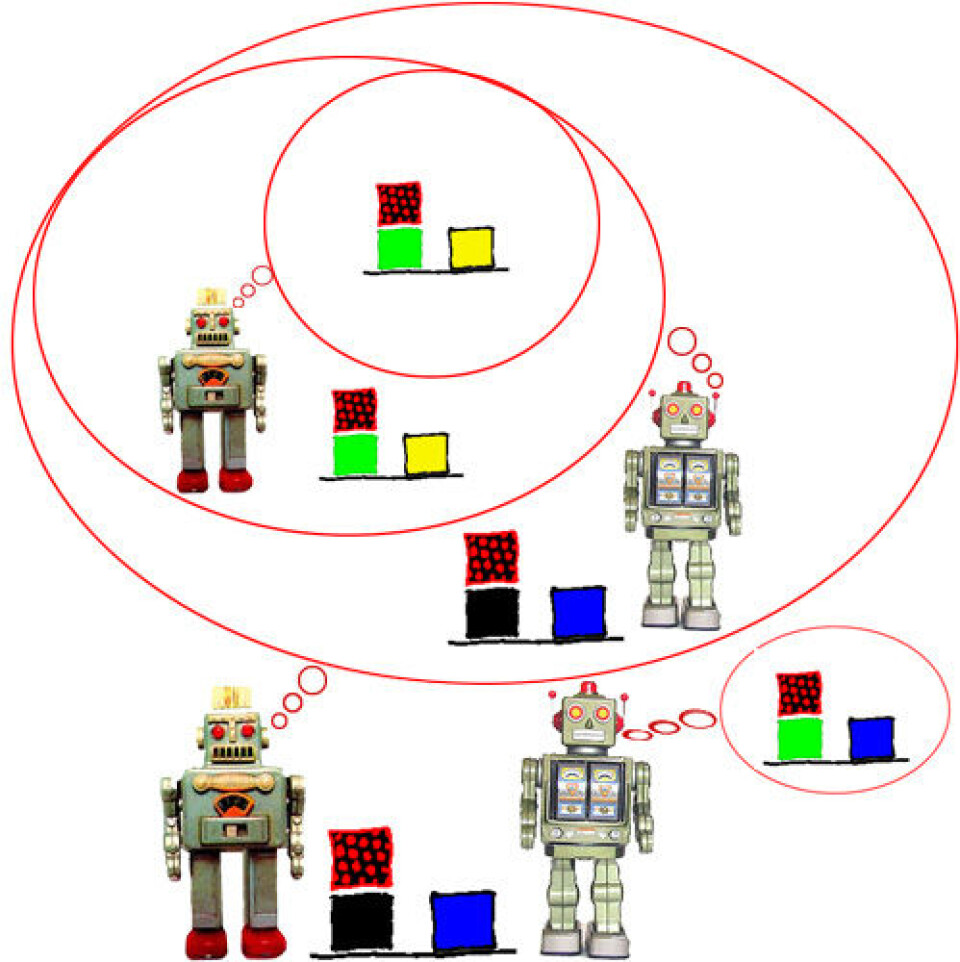
(Foto: Thomas Bollander)
Agenter utnytter hverandres kunnskap
Sosialt intelligente roboter som kan måle seg med oss, ligger fremdeles et stykke ute i fremtiden, men Bolander og kollegene hans har foreløpig klart å bygge opp et virtuelt univers som er hjemsted for en flokk sosialt intelligente agenter.
Hver agent simulerer et kunstig intelligens-system som har sine styrker og svakheter.
Annonse
Det virtuelle datauniverset gjør det mulig for forskerne å kjøre en rekke testscenarier hvor agentene stilles overfor forskjellige oppgaver som de selv skal finne en løsning på ved hjelp av sin kunstige intelligens.
Det virtuelle universet minner om et elektronisk brettspill, hvor agentene kan rykke fram eller tilbake, samle opp forskjellige ting underveis, og hvor de kan oppsøke andre agenter for å spørre om hjelp.
Agenter med spisskompetanse
Agentene har hver sine spisskompetanser og kunnskaper om det man kan finne i det virtuelle universet, og utfordringen for den enkelte agenten er å finne fram til og spørre de agentene som har den kunnskapen de trenger for å kunne løse oppgaven.
Agentene vet, overordnet sett, hvem som er eksperter i hva, så under samtalene slipper agenten å starte fra scratch, men kan tilpasse spørsmålene sine slik at de passer nøyaktig til mottakerens kunnskapsnivå.
– Den kunstige intelligensen ligger i at agentene selv må finne ut hvordan de vil løse problemet. Vi gir dem en kunnskap de kan starte med, men den utvikler seg over tid. Agentene kan bygge ut kunnskapen sin ved å snakke med andre, slik at det er en masse dynamikk i den kunnskapen man kan oppnå, sier Bolander.
Ambisjonene er høye
Det virtuelle universet han og kollegene hans har skapt, gir dem en mulighet for å eksperimentere med agentene og dermed også å videreutvikle den kunstige intelligensen sin ved å arbeide med koden som ligger bak.
– Trikset er at agentene representerer forskjellige kunstig intelligens-systemer, slik at vi kan teste dem i forhold til hverandre. På den måten har vi en mulighet til å se hvem som greier seg best, og som derfor er verdt å arbeide videre med, sier Bolander.
Agentene kan fremdeles uhyre lite sammenlignet med det mennesker kan, og deres sosiale ferdigheter ligger bare i at de kan be andre agenter om hjelp på en målrettet måte, slik at den kan få løst problemet sitt. Forventningen er at agentene med tiden vil bli langt mer kompetente, og at intelligenssystemene i praksis vil kunne brukes til noe.
Bolander vil ikke love at de på sikt kommer til å kunne utvikle en kunstig intelligens som kan alt det mennesker kan. Men kanskje er det ikke nødvendig.
– Brukspotensialet er blant annet sykehusroboter som ikke er ekstremt irriterende – fordi de har innlevelsesevne og som dermed kan sette seg i brukerens sted og tilpasse innsatsen sin etter det.
Annonse
– Et annet eksempel er dataspill som aldri blir kjedelige fordi det kan fortsette å utfordre brukeren med nye, kreative påfunn, sier Bolander.
Sykehusrobot fikk økenavn og juling
I USA har robotfirmaet Aethon utviklet sykehusroboten TUG, som er blitt prøvd på diverse sykehus rundt om i landet. Testene ble fulgt av psykologen Bilge Mutlu fra University of Wisconsin, som ville undersøke hvordan de ansatte reagerte på å få en robotkollega.
TUG kan navigere rundt i sykehusgangene, ta heisen på egen hånd og fortelle mennesker at den er ankommet med en ladning varer. Det høres umiddelbart krevende ut for en robot, men det er tilsynelatende ikke nok.
Personalet på barselsavsnittet elsket riktignok roboten, og noen gikk faktisk så lang til å kalle den for «min kjære venn».
De ansatte på kreftavsnittet var imidlertid ikke like imponert, og mente at TUG var ufattelig irriterende.
Langet ut mot roboten
Det faktumet at roboten var ute av stand til å forstå om det var et godt tidspunkt å forstyrre og annonsere sitt nærvær var et stort problem for mange.
En av sykepleierne utbrøt: «Jeg ropte til den: ‘Vil du for helvete holde kjeft? Kan du da ikke se at jeg snakker i telefon, din dumme maskin?? Hvis du sier ‘TUG er ankommet’ en gang til, så sparker jeg til deg’.»
Noen nøyde seg ikke med truslene, men langet ut etter TUG i frustrasjon.
Robotens manglende sosiale kompetanse ga mange ansatte en følelse av at roboten ikke respekterte dem.
– Hvis man vil utvikle roboter med menneskeliknende atferd, så er det viktig at du også utstyrer roboten med den sosiale atferden som hører med, konkluderer Mutlu.